○ 前述したようにプログラムにより制
御装置の構造を作成および変更できる
という柔軟性がある.
○ 記憶能力を持っているのでデータ
の保存や数値制御(NC)等の制御動
作を行わせる事ができる.
○ 信号は数値として扱われるので,
精度が要求される複雑な制御アルゴリ
ズムを実現できる.
○ 時分割動作により複数の制御対象
を制御する事ができるのでコストパフォ
ーマンスが優れている.
|
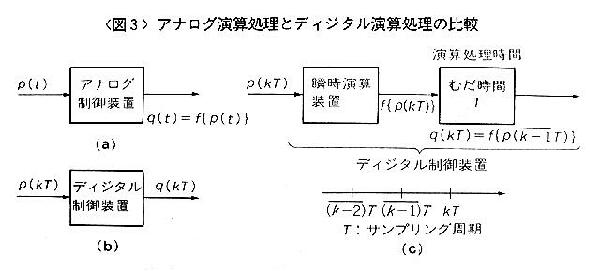
○ 演算処理に時間がかかる為,時定
数が極めて小さな制御対象には適用で
きない.
○ 信号は時間的に離散化され,A/
D変換およびD/A変換による量子化
誤差により分解能がわるい.
|